The second of a two-part series looks at how timing and PCB trace lengths affect different real systems, and design tricks for tuning timing.
On topology diagrams, we can easily visualize or specify the delays between any driver/receiver pair on multi-point nets. Some standards specify PCB design rules this way, for example, DDR-SDRAM DIMM memories (various Jedec JESD21-C documents) or Chipset Design Guides. Some design programs specify the constraints on these diagrams, like the Cadence Allegro Signal Explorer. The topology may be defined graphically, or as a spreadsheet for the point-to-point min./max. or relative length rules.12

Add-in cards: If a bus is routed through multiple boards, then the timing and length rules have to be correct for the whole system together (Figure 20). If different individuals or companies design the boards, they have to agree in the way of dividing the constraints between the boards, as a form-factor standard. In case of a clock tree, if the add-in card clock trace length is closely the same for all cards, then the skew can be controlled only by the motherboard design.

To control the ref./data signal arrival times at the capture flip-flop, control the delays on PCB traces. If two signals have similar drivers and trace lengths (matched), then the propagation delay and the transition delay also will be very similar, and propagation delay matching ensured by simple trace length matching.
The PLL (Phase-Locked Loop, on-chip device) can be used on continuously running clocks to introduce phase delays, negative delays or frequency multiplication. PLLs usually contain some kind of modifier element in their feedback loop. If this modifier element is a frequency divider (by M), then the PLL will generate an output clock, which has a frequency of M*f_in. If the modifier is a DF phase delay element, then the PLL inputs will be DF delayed from the output, so the output will be 360°- DF delayed from the input. If we have a PCB trace as the modifier element, then it will cause the inputs to be late by t_pd comparing to the output, so it looks like if the output was delayed by –1*t_pd from the input.
The DLL (Delay Locked Loop, on-chip device) is a fixed or adjustable delay element. It has “taps”; each tap has a unit delay value. The number of taps connected into the signal path determines the DLL delay.
To maintain the best timing for all on-chip data paths, the chips contain clock networks as balanced trees, so the clock will arrive to each flip-flop within a tight t_pd range. Normally there is an option to place a PLL before the clock tree to achieve zero clock propagation delay through the clock network. In some I/O applications, it might be useful, for example, if the clock network delay is a lot longer than the data path delay.
On bidirectional buses, minimize the clock skew between all the chips. If the clock is generated inside one of the chips, then the clock propagation delay to that chip would be zero, while to the other chips it would be based on the on-board routing. To avoid that, we introduce the same clock propagation delay to the chip generating the clock, by using the feedback clock. This simply routes the clock back to the same chip. A data path with a certain delay in it can be divided into two separate paths by inserting a register or flip-flop into it. Both parts will have the same available time for signal propagation as the original path had, but with only a part of the original delay. Note that the data will arrive one bit time or one clock cycle later to the final capture flip-flop, but it will be captured with better timing margins. This technique is usually used on high-speed on-chip data processing, and on registered DIMM (RDIMM) memory card designs.

Usually the DLL/PLL delays are controllable, and we can also insert register stages in the datapath. These can be fixed by chip design or can be software programmable, but in most of the cases, they are adjusted automatically by a state machine. Examples are the DDR3-SDRAM memory Read and Write Leveling features.2
On-Chip Timing Design
Some of the above methods are really chip-design methods. The chip or ASIC/FPGA designers have to design their I/O interfaces to be operational with realistic board design. To achieve this, they set up timing constraints, use guided logic placement or floorplanning, do careful chip pinout design, use DLLs/PLLs, use localized high-speed IO clock networks, use asynchronous FIFOs and design clever architecture for backend data paths.8,11,13
The different devices in synchronous systems use the same clock source to run their I/O and on-chip flip-flops. There is always one clock generator, and its output is distributed to every device on the same bus. If the bus is bidirectional, then the best way to balance the read/write setup/hold margins is to balance/match the clock propagation delays. If there is a clock skew between two chips, then one of the margins is decreased by the value of the clock skew. The clock skew may be known as uncertainty (peak to peak), or as an absolute value (with a sign).
DDR-SDRAM memory interfaces have source-synchronous data buses (lanes), and they have a unidirectional synchronous address/command/control (ACC) bus. We have two types of implementations: the DIMM socketed card, and the Memory-Down, where the chips are soldered onto the motherboard. Either designing a DIMM card or a memdown, we usually follow the layout design rules specified in the appropriate card type from the JEDEC JESD21-C standard.2,9,12
The data bus timing is valid in every lane separately between the DQ/DM and DQS strobe signals. The DQS path has a DLL delay in the memory controller chip, so the DQS is delayed before entering to the PCB for write transactions, while for reads it is delayed only after it has arrived onto the controller chip.
The address/command/control (ACC) bus is sampled by the memory chips at the rising edges of the clock signal provided by the memory controller. In case of 2T clocking mode, every second rising edge is used to sample the ACC bus. The ACC bus is routed to every memory chip in a memory channel, so it can have a very heavy loading, which creates very slow transition delays. If the load is above a certain value, then we need registered/buffered DIMM memories. DDR1 and DDR2 standards use balanced-tree clock/ACC topology to make sure all chips get the clock/ACC in the same time, while DDR3 uses the Fly-By topology to minimize SNN and to have only one end where we can terminate them.

Reference-Reference Timing
Although the main I/O matching is between the data-strobe and the clock-ACC, there are also clock-to-strobe design rules. These are based on the chip timing design behind the I/O flip-flops.
The memory chips expect the first valid databit to arrive a certain time after they have captured a write command. The controller puts the first databit to the bus with the right timing, but the board design has to make sure that this timing is still maintained when the signals arrive to the memory. This requires a length matching between the clock and the strobe signals. For this, there is an output guaranteed skew timing parameter from the controller data sheet, and an input maximum skew parameter from the memory chip data sheet. This input parameter of the memory is the t_DQSS, which is +/- t_clk/4, between the rising edge of the clock and the rising edge of the DQS signal. They also specify a clk-rising to DQS-falling-edge input rule, which is the t_DSS and the t_DSH parameters together. For DDR3 memories, the write leveling feature can compensate for this.

The memory controller has to pass the captured data from the DQS clock domain to the internal clock domain. This clock domain crossing requires the data to arrive to the controller within a specified time window. This limits the maximum length of the bus, since if the bus is longer, then the data arrives later, decreasing the setup margin in the backend flip-flops. The memory chip data sheet specifies the maximum skew between the input clock and the output DQS, as t_DQSCK. The controller data sheet specifies a maximum skew of the output clock and the input. Both the clock and the DQS trace lengths increase this.
Some FPGA implementations handle this by calibrating the delay with DLLs and registers for all the read DQ/DQS signals.9
Timing calibration. We can include delay circuits in the DQ/DQS paths. These can be fixed, or adjusted by a hardware state machine or by software to achieve optimal timing. For example, if we extend the delay of a reference signal to t_clk, then the effect is like if the reference signal was not delayed at all (in the aspect of STA), although the controller has to expect the data in the next cycle (in the aspect of protocol). The board/chip delays are mostly static for a given board, although they vary between boards and over temperature. That is why we calibrate after power-up. We can measure signal quality by adjusting DLL delays step-by-step, capturing the data and seeking for the DLL value where the captured data is different than in the previous step. This way we can find the boundaries of the Data Valid Window. Then we can set the final delays in the middle of the region.
Write leveling. This process compensates for the clock-to-strobe matching issues, and skew caused by the fly-by ACC topology. The controller puts the memory chips into write leveling mode. Then the memory will sample the CLK using DQS edges; then it sends the captured value to the controller on the DQ0 line. The controller finds the two DLL values where the sampled value changes, then sets the DLL half way.
Read leveling. This process balances the data bus read setup/hold margins by adjusting the DQS delay. In read leveling mode, the controller writes a fixed test pattern into the general purpose register in the memory, reads it back again and again, seeking for the minimum and maximum delays where it can still read the correct data. Then it sets the DLL half way.
All DQ/DQS DLL calibration: FPGA-based memory controller implementations can have a separate DLL on each data line. This way we can compensate on-chip for board/chip mismatch.9

Arbitrary examples. In Compact-PCI systems, a single board computer may be in a system controller or in a peripheral slot. In system controller mode, it has to supply the clocks to all other cards, and in peripheral mode, it has to take the clock from the backplane to clock its backplane I/O circuits. In both cases the clock signals have to be matched with a given tolerance. The system controller slot has 3 to 7 clock output signals, each routed to a different peripheral slot on the backplane with a length of 6.3"+/-0.04". The peripheral cards have to route this clock to their backplane interface circuits with 2.5"+/-0.04" length.

The MB86065 D/A Converter from Fujitsu receives the data as LVDS differential signals from the host (e.g an FPGA), and provides the I/O bit clock to the host. The DAC requires the data and the clock to be in phase + 90° at the DAC pins. The trick is to use a PLL feedback net on the PCB with a delay equal to the clock+data length on the PCB, creating a negative delay for the launch flip-flop. The PLL needs to have a 0° and a 90° output: the 0° for the feedback loop, and the 90° for the launch flip-flop for the extra alignment. This interface is a unidirectional synchronous interface, but the clock is provided by the receiver chip.14

When multiple lanes are used in the high-speed serial interfaces, in the receiver chip each lane has its own CDR (Clock-Data-Recovery) circuit, so each lane’s SerDes will clock its parallel output with a different clock. These have a phase relationship based on the lane-to-lane skew on-board and on-chip. The parallel data are passed to the core clock domain. If that clock domain is derived, for example, from Lane-0 clock, then it will capture the Lane-0 parallel data with proper timing, but the other lanes will be early/late by the lane-to-lane skew. This is usually handled by a clock-DLL for lower speeds or by using asynchronous FIFOs for each lane. In case of a DLL, the max lane-to-lane skew is defined by STA at the clock domain crossing. In case of FIFOs, the maximum lane-to-lane skew is limited by the FIFO depth and the protocol. Some protocols define FIFO under/overflow control by transmitting align characters. The max skew can be t_skew < N * k * t_bit_serial, where they use “k” bits per symbol, and “N” is half the portion of FIFO depth allocated for deskew.12
Calculating PCB Trace Length Constraints
Trace length constraints can be calculated from the timing margins of the pre-layout timing analysis. These constraints are specified to ensure certain propagation delays. For multi-point buses, define pin-to-pin delay rules, or rules for “all pin pairs.” Sometimes the signal travels through a series element: for example, a damping resistor or an AC coupling capacitor. The design program has to be able to measure the pin-to-pin lengths even in these cases.
Specify min./max. absolute or relative (matching) trace propagation delay or trace length rules, depending on the interface type. For the absolute data signal lengths, consider an already specified (by floorplanning) or routed reference signal length. Matching rules cannot be used for them, since the matching offset+tolerance would depend on the reference signal’s length. The relative constraints for data signals specify trace length difference from the reference signal. For them, the reference length need not be specified in advance.
The min./max. data propagation delay can be derived directly from timing margins, since the margins have been calculated using t_pd_data = 0 for absolute rules, or delta_t_pd = 0 for relative rules. Transform the smaller of the RD/WR margins to t_pd by checking what would cause zero margin. If the t_pd_data is a degrading parameter, then transform t_SU_MAR => t_pd_data_max. If t_pd_data is an improving parameter, then transform the -1*t_H_MAR => t_pd_data_min.
In case of timing graphs with existing propagation delays, increase/decrease any PCB trace by the above in the data path, or by the opposite for the reference path. If the two traces are on different types of layers, then they cannot be length matched; they have to be propagation delay matched. If a signal is partially routed on different layers, divide the t_pd for the two layers and calculate lengths separately.
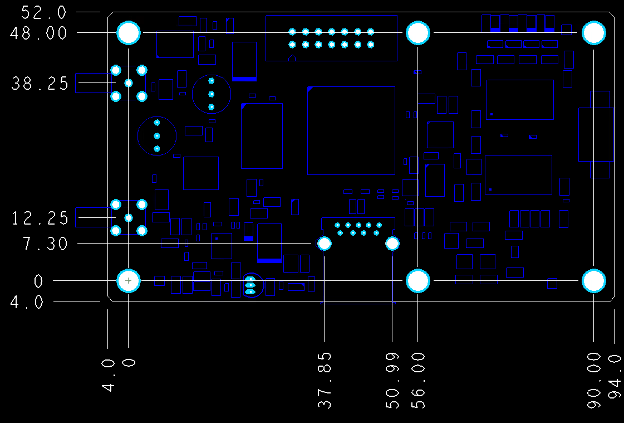
For chips in bigger packages, like x86 chipsets or large FPGAs, the manufacturer provides “package length” information. This is a spreadsheet of routing lengths inside the package for every signal pin. For board design, the package lengths have to be included in the total length. For example, the Cadence Allegro PCB design software handles it as “pin delay.”
Length constraints also can be signal quality-based, for example, to minimize crosstalk, reflections, stub-length and losses. The crosstalk noise voltage and the insertion loss are proportional to the trace length, and are normally simulated as per-unit-length PCB trace parameters. The SI-based rules are much less sensitive to the exact length than the t_pd based rules.
We can simulate two parallel traces at a unit length to get the crosstalk as an S-parameter in dB, then considering the maximum crosstalk-noise voltage we would permit, calculate a maximum parallel-segment length:

Loss-based length constraints use the per-unit-length insertion loss at the signalling frequency:

Longer PCB traces have stronger inter-symbol interference as well, which affects propagation delays through the transition time increase. Differential-pair phase tolerance skew slows down the differential slew rate, closing the eye from the corners. If skew exceeds rise time, then it closes the eye from the sides as well.
Typical PCB Design Rules
Usually the reference path and data path are handled separately. Specify maximum clock skew (in case of a central clock source), or just calculate min./max. data length based on the already routed clock length (if the clock is supplied by one of the chips). To have all the constraints in advance, then based on the floor plan, the clock length can be specified that is the shortest possible but still easily routable and then its value set as a tight absolute length range. Then, use t_pd_clk_min./max. as input parameters to the timing margin calculations. The amount of clock skew (in case of a central clock source) tolerable can be calculated from a pre-layout timing margin with zero skew, and permit 10% of that margin to be clock skew.
Usual PCB design rules:
- Min./max. data bus length.
- Min./max. clock trace length or max clock skew.
An asynchronous interface also has min./max. absolute length rules. The reference signal is always supplied by the master chip. The design rules are min./max. trace lengths for the data signals based on predefined strobe trace lengths.
Usual PCB design rules:
- Min./max. data bus length.
- Min./max. strobe trace length.
Source synchronous systems are designed in such a way to ensure the data and reference signal (strobe) paths have similar delays on-board and on-chip, except the DLL inserted into the reference path. This means the goal is to keep the data signal length within a +/-delta_length window around the strobe trace length. This is the simplest to design, since we are not restricted to using a predefined reference length.
Usual PCB design rules:
- Maximum strobe-to-data skew: as a relative length comparing to the strobe signal’s length. As speed increases, both the min./max. delta length values get closer to zero. In a usual DDR3 memory interface, specify a maximum 0.125 mm delta length.
The usual design constraint is “matching with an offset.” A simple explanatory equation can be derived from the generalized setup and hold equations:
The data t_pd has to be roughly between the clock t_pd and the clock t_pd plus the clock period.

Calculate minimum and maximum length difference of the data signal trace length relative to the clock trace length. It will be asymmetric.
Usual PCB design rules:
- Maximum clock-to-data skew.
- Clock skew: If the clock generator is not inside the transmitter chip, then we have to balance the setup/hold margins with clock delay control.
Clock forwarding interfaces work in the same way as the unidirectional synchronous type, just that they support both read and write operations with separate clock signals for them.
Usual PCB design rules:
- Maximum clock-to-data skew, separately for read and write.
The only trace length rules are signal quality-based and lane-to-lane matching rules.
First calculate min./max. propagation delays for the data signals based on the table below, then calculate lengths. Finally, apply some overdesign so after the layout has been designed, much greater-than-zero timing margins can be expected.
The source synchronous system timing can be handled in an absolute or in a relative way. The equations can be written in the same way as the synchronous systems, then the improving t_pd parameters changed to degrading parameters and multiplied by –1. After this, both the data and the reference t_pd will be degrading, sitting next to each other in the equations. Define delta_t_pd(+) = t_pd_data - t_pd_str, and replace the t_pd to these.
Steps for absolute rules:
1. Choose an absolute reference signal length (with a tolerance) or a maximum clock skew constraint.
2. Determine the reference signal t_pd from signal integrity simulation.
3. Determine the transition delay of the data signal using an estimated trace length.
4. Calculate all the timing margins, where the data signal t_pd is zero. Use t_pd_ref_min./max. as input parameters. If t_pd_clk is improving, then use minimum value, otherwise use maximum.
5. Convert the timing margins to min./max. t_pd for the data signals based on Table 2.
6. Calculate min./max. lengths for the data signals based on t_pd.

Steps for relative rules:
1. Calculate all timing margins, where the data signal and reference signal t_pd both are zero.
2. Transform the timing margins to min./max. t_pd for the data signals, relative to the ref.signal.
3. Determine the transition delays for both the data and the reference signal, based on estimated trace lengths.
4. Calculate min./max. delta_lengths for the data signals.
The length calculation. If the driver/receiver circuits of the data and reference signals are the same, then exclude the transition delay from the relative length calculation, since their transition delays will be near equal. This way their propagation delay matching is simplified to be trace length matching. If L_min > L_max or L_max < 0, then it is not possible to design a board at the given parameters.
Steps:
1. Get the transition delays at the receiver by a signal integrity simulation using estimated trace lengths, both minimum and maximum.
2. The propagation velocity (v) has to be calculated at the signalling frequency: 
where c is the speed of light (3*10^8 meter/sec), Sr_eff is the effective dielectric constant of the materials surrounding the PCB trace.4
3. For absolute rules Length_min = v * (t_pd_min – transition_delay_min) and Length_max = v * (t_pd_max – transition_delay_max). For relative rules delta_Length(+) = v * (t_pd_max - transition_delay_data + transition_delay_ref) and delta_Length(-) = v * (t_pd_min - transition_delay_ref + transition_delay_data). Use min transition delay for maximum length, and maximum transition delay for minimum length, but only if the two signals are not driven by the same chip. Otherwise, both min. or both max.
The overdesign factor (OVDF). After calculating trace length constraints are ensuring minimum zero timing margins, make the system more robust by applying some overdesign. Here we introduce the Overdesign Factor (OVDF= {1.1…20}) for the tightening.
Length_range = Length_max – Length_min
Length_min_new = Length_min + 0.5 * Length_range * (1 - 1/OVDF)
Length_max_new = Length_max - 0.5 * Length_range * (1 - 1/OVDF)
Transforming and summing constraints is simple algebra, but it might not be straightforward. To transform a min./max. length rule to an Offset+/-Delta, use the simple formulae:
Offset = (length_min + length_max)/2
Delta = length_max – Offset
The second case calls for merging two constraints. For example, the chipset design guide provides direct trace length rules for interfacing a DIMM memory to the processor, and we want to design a memory-down layout based on JESD21C guidelines. In such cases, transform both constraints to Offset+/-Delta description, then sum the offsets and deltas separately.
Conclusions
High-speed digital board design requires control of the trace lengths pin-to-pin on multipoint signal nets. To achieve this, software supports detailed complex trace length constraints. Sometimes designers can use standard trace length rules specified by chip manufacturers or standards, while other times they calculate them from pre-layout timing analysis. If the board designer did not use proper length constraints, the boards may never even start up in the lab. Often, timing parameters for the chips on the board are needed, but just not available. In those cases, timing parameters defined at package-pins can be used. What the post-layout timing analysis reveals is not whether the prototype board will start in the lab, but if it will operate reliably in the field at all times. If this verification is absent in product development, the risk is untraceable errors in products will be detected by customers.
1. J. Bhasker and R. Chadha, Static Timing Analysis for Nanometer Designs, Springer, April 2009.
2. JESD79-xx, “DDR-SDRAM Memory Standards,” www.jedec.org
4. Dielectric Constant Frequency Compensation Calculator, buenos.extra.hu/iromanyok/E_r_frequency_compensation.xls.
9. Xilinx DDR-SDRAM controller application notes: XAPP858, XAPP802, xilinx.com/support/documentation/application_notes.htm.
11. David Robert Stauffer et al, High Speed Serdes Devices and Applications, Springer, October 2008.
12. Jedec, JESD21-C, “Jedec Configurations for Solid State Memories,” jedec.org.
13. Steve Kilts, Advanced FPGA Design, Wiley-Interscience, March 2006.
14. Xilinx DAC/ADC interfacing application notes, XAPP873, XAPP866.
Istvan Nagy is with Bluechip Technology (bluechiptechnology.co.uk); This email address is being protected from spambots. You need JavaScript enabled to view it..